领取途径:私信“UG”或者“UG教程”,免费发送
在编写数控加工程序过程中,为了确定刀具与工件的相对位置,必须通过机床参考点和坐标系描述刀具的运动轨迹。
坐标系及运动方向
1.坐标系的确定原则
1)刀具相对于静止工件而运动的原则 这个原则规定不论数控机床是刀具运动还是工件运动,编程时均以刀具的运动轨迹来编写程序,这样可按零件图的加工轮廓直接确定数控机床的加工过程。
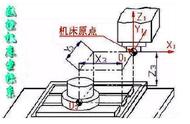
2)标准坐标系的规定 标准坐标系是一个直角坐标系,如图2-1-1(a)所示,按右手直角坐标系规定,右手的拇指、食指和中指分别代表X、Y、Z三根直角坐标轴的方向;如图2-1-1(b)所示,旋转方向按右手螺旋法则规定,四指顺着轴的旋转方向,拇指与坐标轴同方向为轴的正旋转,反之为轴的反旋转,图中A、B、C分别代表围绕X、Y、Z三根坐标轴的旋转方向。

3)坐标轴正负的规定 使刀具与工件之间距离增大的方向规定为轴的正方向,反之为轴的反方向。
2. 机床坐标轴的确定方法 Z轴表示传递切削动力的主轴,X轴平行于工件的装夹平面,一般取水平位置,根据右手直角坐标系的规定,确定了X和Z坐标轴的方向,自然能确定Y轴的方向。
1)车床坐标系
Z坐标轴与车床的主轴同轴线,刀具横向运动方向为X坐标轴的方向

数控机床的两种坐标系
2.1.2 数控机床的两种坐标系
数控机床坐标系有机床坐标系和工件坐标系,其中工件坐标系又称为编程坐标系。
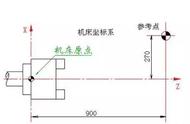
1) 机床坐标系 机床坐标系XYZ是生产厂家在机床上设定的坐标系,其原点是机床上的一个固定点,作为数控机床运动部件的运动参考点,在一般数控车床中,如图所示,原点为卡盘端面与主轴轴线的交点;在一般数控立铣床中,原点为运动部件在X、Y、Z三根坐标轴反方向运动的极限位置的交点,即在此状态下的工作台左前角上。

数控车床坐标系的原点
工件坐标系 设定工件坐标系XpYpZp目的是为了编程方便。设置工件坐标系原点的原则尽可能选择在工件的设计基准和工艺基准上,工件坐标系的坐标轴方向与机床坐标系的坐标轴方向保持一致。在数控车床中,如图1所示,原点Op点一般设定在工件的右端面与主轴轴线的交点上。在数控铣床中,如图2所示,Z轴的原点一般设定在工件的上表面,对于非对称工件,X、Y轴的原点一般设定在工件的左前角上;对于对称工件,X、Y轴的原点一般设定在工件对称轴的交点上。

图一

图二
绝对坐标和相对坐标
1)绝对坐标表示法
将刀具运动位置的坐标值表示为相对于坐标原点的距离,这种坐标的表示法称之为绝对坐标表示法。大多数的数控系统都以G90指令表示使用绝对坐标编程。
2)相对坐标表示法
将刀具运动位置的坐标值表示为相对于前一位置坐标的增量,即为目标点绝对坐标值与当前点绝对坐标值的差值,这种坐标的表示法称之为相对坐标表示法。
大多数的数控系统都以G91指令表示使用相对坐标编程,有的数控系统用X、Y、Z表示绝对坐标代码,用U、V、W表示相对坐标代码,在一个加工程序中以混合使用这二种坐标表示法编程。