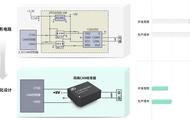
CAN总线
1、CAN总线CAN是控制器局域网络(Controller Area Network)的简称,是ISO标准的串行通信协议,也是国际上应用最广泛的现场总线之一。
CAN总线最早由德国的BOSCH公司在1986年为汽车监测和控制而设计的,主要用于汽车内部测量与执行部件之间的通信。
CAN总线适用于大数据量短距离通信或者长距离小数据量,实时性要求比较高,多主多从或者各个节点平等的现场中使用。

CAN帧
CAN总线特点有:
- 数据通信没有主从之分,任意一个节点可以向任何其他节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序;
- 多个节点同时发起通信时,低优先级的 避让 高优先级的,避免对通信线路造成拥塞;
- 通信距离最远可达10km(速率低于5Kbps),速率最高可达到1Mbps(通信距离小于40M)。在汽车中使用时通常为500kb/s,最低的也达到100kb/s;
- CAN总线传输介质可以是双绞线,同轴电缆。
CAN的高性能和可靠性已被广泛认同,并被广泛应用于自动化、船舶、医疗设备、工业设备等方面,被称为自动化领域的计算机局域网。
不过CAN总线也存在一些缺陷:
- 一是CAN总线通过采用载波监听无损的仲裁技术,在网络负载比较小时,CAN总线实时性可以满足各方面的需求,但随着网络负载不断增大,如果继续使用基本的CAN协议,低优先级的信息发送的实时性就会受到影响,甚至退出总线竞争;
- 二是CAN总线协议采用静态固定优先级分配方式,这样不同优先级的信息就难以公平地共享总线使用权。
LIN(Local Interconnect Network)总线,是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,在1998年被首次提出。
LIN总线的目标是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。
LIN总线有一个主节点,其他是从节点。从节点不能主动向主节点传输信息,只有主节点需要从节点才能发送信息。LIN总线的传输速率最高只有20Kb/s。
因此,LIN总线是一种辅助的总线网络,适用于在不需要CAN总线的带宽和多功能的场合,比如智能传感器和制动装置之间的通讯使LIN总线可大大节省成本。