快速性,稳定性、准确性是相互制约的。
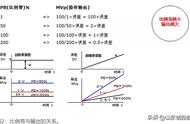
1、比例系数,直接据欸的那个控制作用的强弱,加大,可以减少系统的稳定误差,提高系统的动态响应速度,但过大会使动态质量变坏,引起被控制量震荡甚至导致闭环系统不稳定;
2、在比例调节的基础上,加上积分控制可以消除系统的稳态误差,因为只要存在偏差,他的积分所产生的控制量总是用来消除稳态误差的,直到积分的值为零,控制作用才停止,但它将使系统的动态过程变慢,而且国强的积分作用使系统的超调量增大,从而使系统的稳定性变坏。
3、微分的作用跟偏差的变化速度有关,能够预测偏差,产生超前的校正作用,有助于减少超调,克服震荡,使系统趋于稳定,并能加速系统的动作速度,减少调整时间,改善系统的动态性能,



增量式PID特点:算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;手动—自动切换时冲击小。当控制从手动向自动切换时,可以作到无扰动切换。
位置式PID特点:在积分环节,对从0时刻到当前时刻的所有偏差进行积分,是非递推式的全局积分。当前采样时刻的输出与过去各个时刻有关,运算量大,且控制器输出对应执行机构的实际位置,若计算出现故障,执行机构动作变化幅度大。
位置式:

增量式:

调试:
1、调试P,临界状态后,在其基础上增加30%--40%
2、然后调I,方式同P,然后在其基础上增加60%--80%
3、稍微调D,不震荡即可;
最简单的闭环控制技术之一 ,惰性系统:变化速度慢,调节速度慢,控制周期长
控制原理简单可靠,参数调整简便,实用性强
智能车不适用PID,变化太慢,惰性和滞后性;PD D做补偿,防止震荡和超调;
调P ,会出现震荡,调I ,震荡会消除很多,但是变化会缓慢,然后调D,增加调节的灵泛性和预见性,在给定速度变化的过程中,能够以一个平稳过渡来变换。
,