图21-2
为了便于讲解外部接线,我们结合例子说明,如执行指令IST X0 S20 S40,此时PLC用于IST指令的输入口有X0~X7。显然,各种工作方式不可能同时执行,所以X0~X4不能同时接通,因此外部接线应选择旋转开关(选择开关)。另外,手动工作方式应能单独控制各个负载设备的单独工作。
基于以上说明,我们就可以很快画出PLC的外部接线啦,如下图21-3所示。除了IST指令所指定的X0~X7输入口,手动操作工作方式下对各个负载设备的控制也用到了其他地址的输入口。当然,对于其他输入口的使用,没有相关规定,可以自由选择。但一旦选好这些输入口,梯形图的编写就得按这些输入口地址来。

图21-3
IST指令的PLC外部接线与控制面板如图21-3所示,其几个工作内容如下:
(1)把旋转开关打到“原点回归”工作方式下,按下“原点回归起动”按钮,使系统做原点回归工作。
(2)把旋转开关打到“单步”工作方式下,按下“起动”按钮,每按一次该按钮,系统顺序前进一个工步(状态步)。
(3)把旋转开关打到“单周期”工作方式下,按下“起动”按钮,每按一次该按钮,系统完成一次顺序控制流程并回到原点停下。
(4)把旋转开关打到“自动”工作方式下,按下“起动”按钮,系统自动连续(循环)执行顺序控制流程,直到按下“停止”按钮,系统运行完最后一个周期并回到原点停下。
(5)把旋转开关打到“手动操作”工作方式下,按下手动操作负载按钮的各个XX按钮,就可以手动控制各个设备单独运行,例如控制电机的正转、控制电机的反转等。
(6)按下“电源”按钮,接通PLC;按下“停止”,断开PLC电源。
知道了IST指令的外部接线后,我们接着学习IST指令的SFC与梯形图。
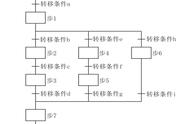
IST指令的SFC与梯形图结合上篇文章,在应用IST指令的基础下,多种工作方式编程的程序结构如下图21-4所示。公用程序为几种工作方式共用,手动操作程序为一个SFC,原点回归程序为一个SFC,单步、单周期和自动共为同一个SFC。

图21-4
基于图21-4,我们可以将整个梯形图分为4部分,每一部分都有着一定的特点,接下来就让我们看看有哪些特点吧!
1、公用程序
如下图21-5所示为公用程序部分,上篇文章已经提过,M8044为原点标志特殊继电器,所以这段程序是用于判断机器设备是否处在原点位置,并作为自动方式的运行条件。另外,第二行为输入IST指令。

图21-5
2、手动操作程序
手动操作部分的程序也比较简单,其状态步只有初始状态步S0,因为其手动驱动各个负载设备的工作,所以其触点要和外部输入口地址一一对应。结合上篇文章的机器人跳舞例子,手动操作的SFC如下图21-6所示。