绝对编码器通讯数据图
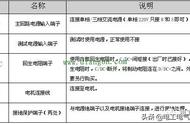
接完线后我们需要在驱动器上设置控制模式,参数等等。
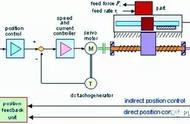
其中,伺服系统的控制模式分为
一:位置控制模式
二:速度控制模式
三:转矩控制模式
四:全闭环控制模式
根据需要驱动的设备选择模式,每个模式的参数设置方法都不相同,但只要熟悉一个其他的调试起来也很快。

这只是试运行参数,并不是所有参数,参数设置请参考驱动器手册
设置完参数后我们看下程序,以前我们说过,西门子s7-200smart系列对运动控制支持得很好,不仅最大脉冲数足够,而且运动控制非常方便,不需要拓展库文件。

打开S7-200smart软件后添加运动向导(轴的区别只在于输出的Q点不同)

按照电机参数和机械尺寸填写实际数据,以便与真实位置对应。