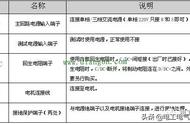
控制端子,按照接线图接线即可

程序注释;第一行为驱动器使能行,没有的话驱动器无法动作,可以用来做紧急制动。
第二行为编码器清零,此文中的编码器为相对式。第三行为控制输出行,其中START端子应该由上升沿控制,文章中的是一个往复运动的例子。除了以上三个程序指令,运动控制还有其他功能,等着您来探索。
每篇文章都倾注了我的心血,请大家支持原创!喜欢的话请点赞并分享,您的支持是我坚持下去的动力!送人玫瑰,手有余香!
控制端子,按照接线图接线即可
程序注释;第一行为驱动器使能行,没有的话驱动器无法动作,可以用来做紧急制动。
第二行为编码器清零,此文中的编码器为相对式。第三行为控制输出行,其中START端子应该由上升沿控制,文章中的是一个往复运动的例子。除了以上三个程序指令,运动控制还有其他功能,等着您来探索。
每篇文章都倾注了我的心血,请大家支持原创!喜欢的话请点赞并分享,您的支持是我坚持下去的动力!送人玫瑰,手有余香!














Copyright © 2018 - 2021 www.yd166.com., All Rights Reserved.