工业机器人
一、填空题
1、按坐标形式分类,机器人可分为 直角坐标型 、 圆柱坐标型 、球坐标型
和 关节坐标型 四种基本类型。
2、作为一个机器人,一般由三个部分组成,分别是 控制系统 、 传感系统 和 机械系统 。
3、机器人主要技术参数一般有 自由度 、 定位精度 、 工作范围 、重复定位精度、 分辨率 、承载能力及最大速度等。
4、自由度是指机器人所具有的 独立坐标轴运动的 的数目,不包括 末端操作器 的开合自由度。
5、机器人分辨率分为 编程分辨率 和 控制分辨率 ,统称为 系统分辨率 。
6、重复定位精度是关于 精度 的统计数据。
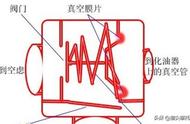
7、根据真空产生的原理真空式吸盘可分为 真空吸盘 、 气流负压吸盘 和
挤气负压吸盘 等三种基本类型。
8、机器人运动轨迹的生成方式有 示教再现运动 、 关节空间运动 、 空间直线运动 和空间曲线运动。
9、机器人传感器的主要性能指标有 灵敏度 、 线性度 、 测量范围 、重复性、 精度 、分辨率、响应时间和抗干扰能力等。
10、自由度是指机器人所具有的 独立坐标轴运动 的数目。
11、机器人的重复定位精度是指 在同一环境、同一条件、同一目标动作、同一命令下,机器人连续重复运动若干次时,其位置分散情况 。
12、机器人的驱动方式主要有 液压驱动 、 气压驱动 和 电气驱动 三种。
13、机器人上常用的可以测量转速的传感器有 测速发电机 和 增量式码盘 。
14、机器人控制系统按其控制方式可以分为 力 控制方式、 轨迹
控制方式和 示教 控制方式。
15、按几何结构分划分机器人分为: 串联机器人、 并联机器人 。
二、单项选择题(请在每小题的四个备选答案中,选出一个最佳答案。)
1、 工作范围是指机器人 B 或手腕中心所能到达的点的集合。
A 机械手 B 手臂末端 C 手臂 D 行走部分。
2、机器人的精度主要依存于 C 、控制算法误差与分辨率系统误差。
A传动误差 B 关节间隙 C机械误差 D 连杆机构的挠性
3、滚转能实现360°无障碍旋转的关节运动,通常用 A 来标记。
A R B W C B D L
4、RRR型手腕是 C 自由度手腕。
A 1 B 2 C 3 D 4
5、真空吸盘要求工件表面 D 、干燥清洁,同时气密性好。
A 粗糙 B 凸凹不平 C 平缓突起 D平整光滑
6、同步带传动属于 B 传动,适合于在电动机和高速比减速器之间使用。
A 高惯性 B 低惯性 C 高速比 D 大转矩
7、机器人外部传感器不包括 D 传感器。
A 力或力矩 B 接近觉 C 触觉 D 位置
8、 手爪的主要功能是抓住工件、握持工件和 C 工件。
A 固定 B 定位 C 释放 D 触摸。
9、机器人的精度主要依存于 C 、控制算法误差与分辨率系统误差。
A传动误差 B 关节间隙 C机械误差 D 连杆机构的挠性
10、机器人的控制方式分为点位控制和 C 。
A 点对点控制 B点到点控制 C 连续轨迹控制 D 任意位置控制
11、焊接机器人的焊接作业主要包括 A 。
A 点焊和弧焊 B 间断焊和连续焊 C 平焊和竖焊 D气体保护焊和氩弧焊
12、作业路径通常用 D 坐标系相对于工件坐标系的运动来描述。
A 手爪 B 固定 C 运动 D工具
13、谐波传动的缺点是 A 。
A扭转刚度低 B 传动侧隙小 C惯量低 D 精度高
14、机器人三原则是由谁提出的。(D)
A 森政弘 B 约瑟夫·英格伯格 C 托莫维奇 D 阿西莫夫
15、当代机器人大军中最主要的机器人为:(A)
A 工业机器人 B 军用机器人 C 服务机器人 D 特种机器人
16、手部的位姿是由哪两部分变量构成的?(B)
A 位置与速度 B 姿态与位置 C 位置与运行状态 D 姿态与速度
17、用于检测物体接触面之间相对运动大小和方向的传感器是:C
A接近觉传感器 B接触觉传感器 C滑动觉传感器 D压觉传感器
18、示教-再现控制为一种在线编程方式,它的最大问题是:B
A操作人员劳动强度大 B占用生产时间 C操作人员安全问题 D容易产生废品
19、下面哪个国家被称为 “机器人王国”?C
A 中国 B 英国 C 日本 D 美国
三、是非题(对划“√”,错划“×”)
1、示教编程用于示教-再现型机器人中 。 ( √ )
2、机器人轨迹泛指工业机器人在运动过程中的运动轨迹, 即运动点的位移、速度和加速度。 ( √ )
3、关节型机器人主要由立柱、前臂和后臂组成。 ( × )
4、到目前为止,机器人已发展到第四代。 ( × )
5、磁力吸盘能够吸住所有金属材料制成的工件。 ( × )
6、谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形的变化。N ( × )
8、由电阻应变片组成电桥可以构成测量重量的传感器。Y ( √ )
9、激光测距仪可以进行散装物料重量的检测。Y ( √ )
10、机械手亦可称之为机器人。Y ( √ )
四、简答题
1、机器人手腕有几种?试述每种手腕结构。 答:机器人的手臂按结构形式分可分为单臂式,双臂式及悬挂式按手臂的运动形式区分,手臂有直线运动的。如手臂的伸缩,升降及横向移动,有回转运动的如手臂的左右回转上下摆动有复合运动如直线运动和回转运动的组合。2直线运动的组合2回转运动的组合。手臂回转运动机构,实现机器人手臂回转运动的机构形式是多种多样的,常用的有叶片是回转缸,齿轮转动机构,链轮传动和连杆机构手臂俯仰运动机构,一般采用活塞油(气)缸与连杆机构联用来实现手臂复合运动机构,多数用于动作程度固定不变的专用机器人。
2、工业机器人控制方式有几种? 工业机器人的控制方式多种多样,根据作业任务的不同,主要分为点位控制方式、连续轨迹控制方式、力(力矩)控制方式和智能控制方式。 答:
1)点位控制方式(PTP)
这种控制方式的特点是只控制工业机器人末端执行器在作业空间中某些规定的离散点上的位姿。控制时只要求工业机器人快速、准确地实现相邻各点之间的运动,而对达到目标点的运动轨迹则不作任何规定。这种控制方式的主要技术指标是定位精度和运动所需的时间。
2)连续轨迹控制方式(CP)
这种控制方式的特点是连续的控制工业机器人末端执行器在作业空间的位姿,要求其严格按照预定的轨迹和速度在一定的精度范围内运动,而且速度可控,轨迹光滑,运动平稳,以完成工作任务。
3)力(力矩)控制方式
在完成装配、抓放物体等工作时,除要准确定位外,还要求使用适度的力或力矩进行工作,这时就要利用力(力矩)伺服方式。这种方式的控制原理与位置伺服控制原理基本相同,只不过输入量和反馈量不是位置信号,而是力(力矩)信号,因此系统中必须有力(力矩)传感器。有时也利用接近、滑动等传感功能进行自适应式控制。
4)智能控制方式
机器人的智能控制时通过传感器获得周围环境的知识,并根据自身内部的知识库做出相应的决策。采用智能控制技术,使机器人具有了较强的适应性及自学习功能。智能控制技术的发展有赖于近年来人工神经网络、基因算法、遗传算法、专家系统等人工智能的迅速发展。
4、机器人参数坐标系有哪些?各参数坐标系有何作用? 答:工业机器人的坐标形式有直角坐标型、圆柱坐标型、球坐标型、关节坐标型和平面关节型。
1)直角坐标/笛卡儿坐标/台架型(3P)
这种机器人由三个线性关节组成,这三个关节用来确定末端操作器的位置,通常还带有附加道德旋转关节,用来确定末端操作器的姿态。这种机器人在X、Y、Z轴上的运动是独立的,运动方程可独立处理,且方程是线性的,因此,很容易通过计算机实现;它可以两端支撑,对于给定的结构长度,刚性最大:它的精度和位置分辨率不随工作场合而变化,容易达到高精度。但是,它的操作范围小,手臂收缩的同时又向相反的方向伸出,即妨碍工作,且占地面积大,运动速度低,密封性不好。
2)圆柱坐标型(R3P)
圆柱坐标机器人由两个滑动关节和一个旋转关节来确定部件的位置,再附加一个旋转关节来确定部件的姿态。这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单;直线部分可采用液压驱动,可输出较大的动力;能够伸入型腔式机器内部。但是,它的手臂可以到达的空间受到限制,不能到达近立柱或近地面的空间;直线驱动器部分难以密封、防尘;后臂工作时,手臂后端会碰到工作范围内的其它物体。
3)球坐标型(2RP)
5、人手爪有哪些种类,各有什么特点?
答:(1)机械手爪:依靠传动机构来抓持工件;
(2)磁力吸盘:通过磁场吸力抓持铁磁类工件,要求工件表面清洁、平整、干燥,以保证可靠地吸附,不适宜高温条件;
(3)真空式吸盘:利用真空原理来抓持工件,要求工件表面平整光滑、干燥清洁,同时气密性要好。
6、编码器有哪两种基本形式?各自特点是什么?
两种基本形式:增量式、绝对式
增量式:用来测量角位置和直线位置的变化,但不能直接记录或指示位置的实际值。在所有利用增量式编码器进行位置跟踪的系统中,都必须在系统开始运行时进行复位。
绝对式:每个位置都对应着透光与不透光弧段的惟一确定组合,这种确定组合有惟一的特征。通过这特征,在任意时刻都可以确定码盘的精确位置。
7、工业机器人常用的驱动器有那些类型,并简要说明其特点。
(1)电动驱动器的能源简单,速度变化范围大,效率高,转动惯性小,速度和位置精度都很高,但它们多与减速装置相联,直接驱动比较困难。
(2)液压驱动器的优点是功率大,可省去减速装置而直接与被驱动的杆件相连,结构紧凑,刚度好,响应快,伺服驱动具有较高的精度。但需要增设液压源,易产生液体泄漏,不适合高、低温及有洁净要求的场合。故液压驱动器目前多用于特大功率的操作机器人系统或机器人化工程机械。
(3)气动驱动器的结构简单,清洁,动作灵敏,具有缓冲作用。但也需要增设气压源,且与液压驱动器相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高、但有洁净、防爆等要求的点位控制机器人。
8、常用的工业机器人的传动系统有那些?
齿轮传动,蜗杆传动,滚珠丝杆出传动,同步齿形带传动,链传动和行星齿轮传动
9、在机器人系统中为什么往往需要一个传动(减速)系统?
因为现在的电机一般速度较高,力矩较小,需要通过传动系统降低转速、提高力矩。
10、机器人上常用的距离与接近觉传感器有哪些?。
超声波,激光、红外,霍尔传感器
11、 按机器人的用途分类,可以将机器人分为哪几大类?试简述之。
1) 工业机器人或产业机器人 应用于工农业生产中,主要用在制造业,进行焊接、喷漆、装配、搬运、检验、农产品的加工等产业。
2) 探索机器人 用于进行太空和海洋探索,也可用于地面和地下探索。
3) 服务机器人 一种半自主或全自主的机器人,其所从事的服务工作可使人类生存的更好,使制造业以外的设备工作的更好。
4) 军用机器人 用于军事目的,或进攻性的,或防御性的。
12、什么是示教再现式机器人?
答:先由人驱动操作机,再以示教动作作业,将示教作业程序、位置及其他信息存储起来,然后让机器人重现这些动作。
13、编码器有哪两种基本形式?各自特点是什么?
两种基本形式:增量式、绝对式
增量式:用来测量角位置和直线位置的变化,但不能直接记录或指示位置的实际值。在所有利用增量式编码器进行位置跟踪的系统中,都必须在系统开始运行时进行复位。
绝对式:每个位置都对应着透光与不透光弧段的惟一确定组合,这种确定组合有惟一的特征。通过这特征,在任意时刻都可以确定码盘的精确位置。
五、按照下图中给定的运动轨迹,编写一段符合要求的运动控制指令。

编辑
添加图片注释,不超过 140 字(可选)
六、请解读下列程序,并写出注释。
1、主程序
PROC main ()
rInitAll;
WHILE TRUE DO
IF di1=1 THEN
rMoveRoutine;
rHome;
ENDIF
WaitTime 0.3;
ENDWHILE
ENDPROC
2、PROC rModPos()
!示教目标点程序
MoveL pPick,v10,fine,tGripper\WObj:=WobjCNV;
MoveL pPlaceBase,v10,fine,tGripper\WObj:=WobjBuffer;
MoveL pHome,v10,fine,tGripper;
ENDPROC
ENDMODULE
3、理解下面指令并画出机器人的运动轨迹图。
PROC Routine1()
MoveL p10,v1000,fine,tool1\WOBj:=wobj1;
MoveC p30,p40,v1000,z1,tool1\WOBj:=wobj1;
ENDPROC

编辑
添加图片注释,不超过 140 字(可选)