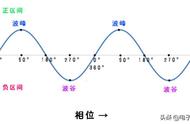
第三是偏振。在第四篇“偏振:古老却依然很新鲜”一文中我们已经讲过,偏振乍一看似乎找不到那个相位,但是深入分析一下就知道,偏振有偏振度和偏振角两个量,其中偏振角就可以等效看作相位。

第四是结构光成像。我们知道,当平面波投射到物体表面时,遵循菲涅尔定律产生折射和反射,物体表面的起伏会产生相位的变化,将不再是平面波,记录下此时的波前,便能够恢复出物体的三维形貌。这是教科书的表述方式,实验却没那么容易。
我们希望在自然环境中也能够记录相位,实现三维成像。其实很简单,采用结构光照明,典型的就是黑白相间的平行条纹,投射到物体表面,就能看到条纹的形变,这种形变恰恰是我们通过照明的方式引入的相位;记录下条纹形变,就可以解析出相位,从而重建三维形貌。
第五是大气和水等混沌介质,这种我们可以称为“计算介质”的东东,在成像中往往起着很坏的作用,大气扰动会使天文望远镜看不清目标,于是就产生了自适应光学;还会产生散射,我在上一篇里已有论述。
第六是傅里叶变换。傅里叶变换也是复数形式,有频谱图和相位图;图像傅里叶变换相位图代表的是图像的位置和结构信息。在计算光学成像中,我们经常遇到的是在频域里处理信息,就会与傅里叶相位打交道,散斑自相关成像就是典型的案例,其相位恢复就是恢复傅里叶变换相位。傅里叶望远镜当然关系更大了。

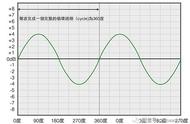
数学的傅里叶变换
还有一种是相关运算引入的相位。其实可以把相关运算看作与傅里叶变换是一样的东西,只是一种拓展而已。
再进一步看,其实还有很多与相位相关的,比如有像差的光学系统、多目相机、微透镜阵列、多角度照明等,都有相位的引入。只是,这些相位有的是“坏”的,我们不想要的,比如像差,而有的是我们想要引入的“好”的相位,比如多角度照明。
上面说了这么多,那相位到底能干什么?
2 相位能干什么?
首先,相位属于高维度的物理量,高维度的信息经过好的处理,投影到低维度,一定会有好的结果,这当然要看我们在低维度空间到底想要什么。光电成像朝着“更高、更远、更广、更小、更强”的目标发展,从应用的维度上看,我们需要把偏振、光谱、相位等高维度的物理信息转换为分辨率、作用距离、视场、重量体积和环境适应能力等,当然还有深度信息。

维度信息效能雷达图
下面就讨论一下“相位”在计算光学成像中的法力。
从相位本身的物理意义上来看,它是表征“相对位置”的一个物理量,那就天然地就决定了它具备与位置相关的能力,比如全息就是一个典型的例子。那么,相位在三维成像、提高成像分辨率、简化光学系统设计和提高环境适应能力等方面能发挥什么作用。
三维成像方面的相位
全息成像真正拉开了三维成像的序幕,从全息干板到现在的数字全息,都离不开相位,只是干板记录的是干涉条纹,通过光源照射还原相位信息,能看到真实的三维图像,而且,即使干板打碎,每一个小块都记录了物体的全息图,只是分辨率下降了;而数字全息则通过光电探测器记录全息图,借由标量衍射理论从干涉强度图里恢复出相位,从而达到全息的目的。
光电成像和显示,一定要走向三维!而光电成像实现的二维图像,没有深度信息,就谈不上三维。那如果能记录下或者恢复出相位,可否像全息成像,重建出三维的图像呢?答案是肯定的。
利用非相干光进行三维的成像的例子有:双目立体视觉、结构光照明三维成像、偏振三维成像和散射成像等。
双目立体视觉是利用视差和三角几何关系实现的,只是深度计算模型按照理想相机建立的,实际应用时,需要对双目相机进行标定,得到内外参数和相应矩阵。这个应用与相位无关。