齿轮啮合转动时,输入轴上的主动齿轮依靠电机驱动,输出轴上的被动齿轮依靠齿轮间的轮齿啮合被驱动,齿轮系统会因啮合部位的内部激励而产生的齿轮啮合振动,而这些振动成分都将被嵌入齿轮端面的加速度传感器所感知到,若要建立齿轮端面的加速度局域强信号模型,有必要研究齿轮啮合振动机理,探明齿轮啮合振动的主要特征。
齿轮机构是一种高副机构,包含了主动齿轮,从动齿轮和机架等构件。通过每对轮齿的依次啮合传递了两根传动轴之间的动力和运动,轮齿间的挤压和碰撞是齿轮啮合中最直接,最重要的部分,这会使得在啮合过程中轮齿齿廓产生一定的弹性变形。
齿轮具有一定的质量,成对的轮齿可以看作是弹簧,所以为了研究齿轮振动,可将一对齿轮作为研究对象,将齿轮副看作一个弹簧质量振动系统,建立出齿轮振动的简化模型。

基于齿轮端面局域强信号的模型可知,齿轮的局域强信号中包含传感器安装位置的切向加速度和向心加速度,两个加速度的方向分别与传感器的灵敏度方向平行。齿轮箱体广域信号采集的方法中通常将加速度传感器布置在固定不动的零件上采集信号,加速度传感器内部的质量块具有竖直向下的重力加速度。
但因被测件固定,传感器灵敏度方向与重力加速度方向之间的夹角保持不变,传感器感知到自身的重力加速度分量也保持不变,该加速度分量转化为电信号时为直流电平,通常被传感器的交流耦合电路进行消除,广域信号中一般不包含重力加速度。
而齿轮局域强信号的采集方法中传感器随着轮体转动,传感器灵敏度方向与重力加速度方向之间的夹角不断变化,传感器感知的重力加速度分量是随时间变化,不再是直流分量,则齿轮的局域强信号中包含了加速度传感器本身的重力加速度沿着传感器两个灵敏度方向的投影分量。

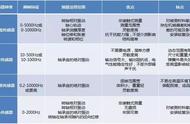
局域强信号中主要包含了齿轮的扭转振动以及重力加速度在传感器灵敏度方向的投影分量。为了验证该模型的正确性,在下表所示工况下进行仿真,分别提取出两齿轮啮合转动时被动齿轮端面某点与心的距离L为28mm 和0.1mm处切向通道和径向通道的加速度信号。

利用动力学仿真建立齿轮系统仿真模型,求解出被动齿轮的角速度和角加速度并直接输出在齿轮端面上与齿轮圆心距离不同的两个测点的加速度信号,验证了该模型的正确性。齿轮端面的加速度局域强信号频谱中均出现了转频和啮合频率。
因切向加速度与角加速度相关,向心加速度与角速度的平方相关,所以两个通道的加速度信号幅值和波形均具有较大的差别,且测点与齿轮圆心的距离也会影响加速度信号的幅值。
转子端面安装加速度传感器,传感器随着转子转动,而重力加速度本身的大小始终不变,方向始终竖直向下,因此传感器的灵敏度方向与重力加速度方向之间必然存在的夹角,并且夹角大小会按照转子转动频率不断变化。
加速度传感器测量的加速度信号中将被叠加传感器自身的重力加速度在传感器灵敏度方向上的投影分量,该分量中包含了转子的转角信息,即转子的角位移,局域强信号重力加速度分量中包含的转角信息,如图所示。但重力加速度分量与切向加速度,向心加速度等分量耦合在一起构成局域强信号,不能直接对原始局域强信号进行处理获得转角信息。