转子端面的加速度局域强信号中包含了重力加速度在传感器灵敏度方向上的投影分量,重力加速度分量的频率等于圆盘转子的转频,相对于其它振动成分的频率,转频通常处在局域强信号的低频区域,可用 FIR(Finite Impulse Response)低通滤波器将重力加速度分量解耦分离出来。
FIR 滤波器具有严格的线性相位,使得滤波后的信号相位关系与原信号中的相位关系保持一致,不会发生相位错乱,保证预估转角转速的正确性。
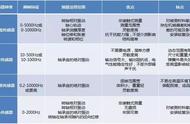
基于参数所设计的线性相位 FIR 低通波器的幅频特性,如图所示,其通带较窄,由局部放大图可知在 0~15Hz 的通带幅值保持平稳,减极小,特征点在频率为 14.52Hz 时,幅值为-0.001798dB。在阻带内幅值小于-50dB,且过渡带衰减较快,满足设计要求。

为了验证构建的圆盘转子端面局域强信号模型和基于此模型提出的转角转速预估方法的正确性,设计了合适的加速度传感器和圆盘转子实验台,采集转子端面切向和径向的加速度局域强信号。
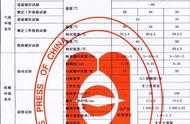
单向 MEMS 加速度传感器的 PCB 图如图所示。传感器的尺寸只有17mmx18.5mmx3mm,整体尺寸较小,质量很轻。通常单向MEMS 加速度传感器的 PCB 板上元器件较少,采用三线制,分别为电源输入端,接地端,信号输出端,需要提供外部直流电源进行供电。
而本文中 MEMS 传感器采用了有 4mA 电流消耗的 IEPE 兼容接口电路。IEPE 接口是一种2 线协议,只有信号输出端和接地端在该协议中,信号采集仪器通过信号线向传感器提供恒定电流。传感器实物只需焊接两根延长线,不再需要外部供电,让加速度传感器的布置,内部走线和使用更加方便简单。