编者按
近日,新加坡国立大学工程师团队开发新型混合机器人系统,通过模拟人类抓取,使机器人能够安全地与各种形状、尺寸和硬度的精致物品互动,进而彻底改变传统的拾取和放置任务,并将大力推动各行业自动化进程。

抓手系统的突破与创新

受到人手自然灵巧的启发,新加坡国立大学(NUS)的工程师团队创造了一个可重新配置的混合机器人系统,能够抓取各种小型、柔软、精致或是大型、笨重的物体。
这项技术预计将影响一系列行业,包括食品组装、垂直农业和快速消费品包装,这些行业在未来几年将逐步实现更多的自动化操作。

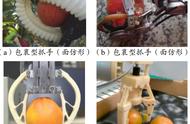
新型机器人抓手,来源:NUS
在NUS生物医学工程系和NUS先进机器人中心的Raye Yeow副教授的领导下,这种混合机器人抓手使用了柔软、灵活的3D打印手指,并带有可重新配置的抓手底座。
在该团队的初创公司RoPlus(RO )的带领下,机器人的创新成果现在正被推向商业伙伴,该团队由NUS研究人员Low Jin Huat、Khin Phone May、Chen Chao-Yu和本科生Han Qian Qian组成。