原创不易,请勿抄袭!
上篇文章我们学习了变频器和伺服系统的区别。那么今天和大家聊一下,伺服驱动器的接线、编程方法以及注意事项。
伺服驱动器使用方法大体和变频器一样,在这里需要注意的是伺服驱动器的选型不只有功率一个参数,还有低惯量和高惯量。
低惯量类型一般转矩低,转速高,适合一些负载轻,运动频繁的控制。高惯量类型转矩高,转速低,适合一些负载较大的控制。所以需要根据现场情况选择合适的驱动器,否则要不就是转速跟不上,要不就是电机过热影响寿命。
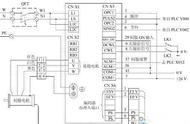
这里我们以松下A5系列伺服驱动器配合西门子S7-200smart为例说明。第一步,先接线,A5系列伺服驱动器需要接线的端子共有XA(供电电源的控制电源)、XB(电机输出线)、X4(控制线)和X6(电机编码器线)。我们看下接线图。(如果需要使用绝对位置控制,即是使用绝对编码器的话还需要通讯,绝对位置控制本身照比相对位置控制更加准确,且不受外界因素影响,缺点是绝对位置编码器不好维护,出现问题后需要手动复位,复位过程较麻烦,而且松下的驱动器为了保证绝对编码器的精度和安全,通讯使用的是很复杂的多次校验,对于新手很不友好,需要先学习中断,本篇文章不做拓展,如果敢兴趣的话请在评论区留言)



控制端子上有很多保护端子,需要将这些端子都短接才能正常使用