作者:
杨博 刘建业 景江安 张晓康 郑建隆 周江华 孟续
(天河道云(北京)科技有限公司 北京 100176)
摘要:
中深孔形成的大空区,以及无底柱分段崩落法形成的悬顶,此类空区的存在将影响矿山安全生产,为了解空区变形情况,需要定期对空区进行变形监测,由于传统测量设备的局限性,无法完成空区变形监测工作,架站式扫描仪只能在入口处采集数据,数据盲区较大,也无法真实反应空区变形情况,而采用机载扫描仪,将扫描仪带入空区内部采集数据,可以实现高质量空区数据采集,对比两期模型可以反映空区变形情况,为矿山安全生产保驾护航。
关键词:
三维 激光扫描仪 机载 安全 空区
一、扫描仪原理
通过激光扫描仪发出激光脉冲信号,经目标表面漫反射后传回到接收器,得到所测目标点的距离s,通过水平扫描角度α与垂直扫描角度β以及已知测量距离s,即可由式(1-1)计算出所测点的坐标。


式(1-1)
扫描仪可发射主动光源,保障了设备工作不受光线限制,保障了设备在井下光线较弱环境下的正常使用。
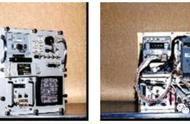
二、架站式扫描仪与机载扫描仪的区别
目前可应用于井下测量的扫描仪可分为架站式(如Maptek的SR3)和手持式(如翼目神的HVM100)两类,其中架站式扫描仪类似全站仪,需要在固定点测量,后期将各站数据拼接到一起,其优点是距离远(最大可达600m),精度高(可达毫米级),并可实时查看数据,其缺点是较笨重,效率低,往空区里延伸时较麻烦;手持式扫描仪采用SLAM技术,可以实现边走边采集数据,其优点是速度快,效率高,重量轻,可以实现多平台搭载(手持、延伸杆、机载、车载、背包等),缺点是精度较差(厘米级)。
三、机载扫描仪介绍
井下无GPS信号,无人机飞行时无法自动定位,导致无人机的操控难度较大,为了实现无人机在井下的安全飞行,需要有一套避障系统,为无人机定位,降低无人机的操控难度。
3.1、SLAM技术介绍
SLAM (simultaneous localization and mapping),意为实时定位与地图构建。简而言之就是,将一个机器人放入未知环境中的未知位置,机器人一边移动一边逐步绘制出此环境完全的地图,同时可以在这个过程中进行对自身的定位。
SLAM包含:三个过程
- 感知——机器人能够通过传感器获取周围的环 境信息。
- 定位——通过传感器获取的当前和历史信息, 推测出自身的位置和姿态。
- 建图——根据自身的位姿以及传感器获取的信 息,描绘出自身所处环境的样貌。