SAE车载网络分类
3.2 常用车载网络
常用车载网络有CAN、LIN、FlexRay、MOST和LVDS等。除LVDS外,其他都是专门为汽车行业设计的通信网络。
CAN
CAN,为控制器局域网(Controller Area Network),由博世公司提出。
CAN是一种总线型、串行通信、广播式网络,节点间通过双绞线连接。它不仅能简化车辆各电子控制单元的设计和安装,还减轻布线的重量和降低了对空间的要求。
CAN工作基本原理:
(1)当一个节点要向其它节点发送数据时,该节点的CPU 将要发送的数据和自己的标识符传送给本节点的CAN芯片,并处于准备状态;
(2)当它收到总线分配时,转为发送报文状态。CAN 芯片将数据根据协议组织成一定的报文格式发出;
(3)网上的其它节点处于接收状态。每个处于接收状态的节点对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。

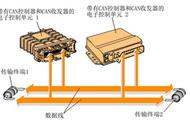
CAN网络基本结构
LIN
LIN,为局部连接网络(Local Interconnect Nework),最初由奥迪、宝马、大众、摩托罗拉等汽车及其供应商组成的LIN联盟提出。
LIN是一种低成本、串行通信网络,通信接口为UART。LIN分主节点和从节点,通过单线连接。LIN主要应用通信带宽要求比较低车身控制方面,如车窗、座椅等,作为CAN通信补充。
LIN工作基本原理:
(1)LIN总线上的所有通讯都由主机节点中的主机任务发起。主机任务根据进度表来确定当前的通讯内容,发送相应的帧头,并为报文帧分配帧通道。
(2)总线上的从机节点接收帧头之后,通过解读标识符来确定自己是否应该对当前通讯做出响应、做出何种响应。一个报文帧可以同时被多个节点接收利用。

LIN网络基本结构
FlexRay
FlexRay的产生主要是,随着车辆安全性、功性能方面的要求越来越高,对数据传输带宽、可靠性要求进一步提供,传统的CAN和LIN已经力不从心。FlexRay最初由宝马、通用、大众、博世等汽车及其供应商组成的FlexRay联盟提出。
FlexRay总线具有确定性、容错性、高速特点,主要应用在对误差容限和时间确定性要求极高的线控领域,如线控驱动、转向、制动等,但因其成本较高、设施复杂等缺点而不会取代其他主要的车载网络标准。
FlexRay基于差分信号传输,总线由两条组成,通常使用双绞线。FlexRay总线数据收发采取时间触发和事件触发的方式。利用时间触发通信时,可尽可能保持传输的同步与可预测,这对需要高速线控控制是非常重要。

FlexRay总线结构
MOST
MOST为多媒体定向系统传输,为车辆一种多媒体应用通信技术,主要应用于车上多媒体和影音娱乐系统。最初由奥迪、戴姆勒、哈曼等汽车及其供应商成立的组织提出。
MOST 总线利用光脉冲传输数据,传输介质通常采用塑料光纤。其采用环形结构,只能朝着一个方向传输数据,MOST最多可连接64个节点。如果其中一个节点故障中断,其他节点也无法传输数据,系统鲁棒性差。