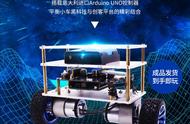
小车年年有,年年不一样。有很多小车设计,这些小车各有特色。今天分享的毕设是外星人tzl(同B站ID)的STM32平衡小车,可以通过手机远程控制,还具有超声波避障功能,抗干扰能力强,同时又可将数据传输至物联网云端。
小车功能概述
首先,由各个硬件模块的功能及封装特点,设计出智能小车的硬件电路原理图以及PCB电路板。根据牛顿力学得出小车的运动微分方程,再经过拉氏变换得到传递函数,利用Simulink对两轮直立智能小车的模型进行实验仿真。其次,根据小车的控制需要,将对手机蓝牙上位机以及手机远程控制小车的上位机APP进行设计与实现。最后,利用ESP8266模块对智平衡小车检测到的温湿度、有害气体浓度等数据上传至贝壳物联云端。
两轮直立智能小车制作完成后,通过实际控制运行证明,PID控制器对小车具有较好的自平衡控制作用,以及在有适当沙石不平整的路面也可以保持相对较稳定的运行效果。利用超声波模块实现了小车的避障功能,实现了手机蓝牙进行近距离控制以及手机物联网上位机进行远程控制,同时将检测到的数据上传至贝壳物联网平台、手机上位机APP以及微信公众号,可很方便的对云数据进行实时查看。
系统模块选择
通过以上对系统相应功能的阐述与归纳,这里将对系统所需要的硬件模块做出合理的选择,各个功能对应的硬件模块选择如下表1和表2所示:

硬件电路设计
✔ 控制器1电路硬件设计
控制器1电路主要负责控制智能小车的自平衡,因此需要对姿态角的获取并进行数据处理,输出相应控制量给电机,通过PID控制器来保持小车的直立以及平稳运行。此外,控制器1将完成与蓝牙上位机的工作以及小车避障等功能。控制器1电路原理图的设计如下图所示:

✔ 控制器2电路硬件设计:
物联网通讯电路主要用于物联网IOT通讯,将两轮智能小车的电池电压、超声波测量距离、测量的温湿度、烟雾浓度等数据发送至贝壳物联平台,再由贝壳物联平台透传至手机。

✔ 智能小车电路板PCB设计
平衡小车的最终PCB设计图如下图所示。