由响应曲线知,智能小车在阶跃输入的情况下,控制系统可在较短的调节时间以及较小的超调量内,使智能小车达到平衡状态。
平衡小车抗干扰能力,实验通过用手推小车顶部来模拟智能小车受到外界扰动,相应的响应曲线如下图所示:
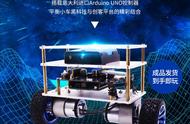
实验测试效果图如下图所示。

通过实际测试,进行了多次APP的改善以及小车蓝牙服务程序的优化,最终证明了手机蓝牙APP上位机可以实现随意控制两轮智能小车前后行驶、加速以及减速、转向运行。同时还可以通过手机蓝牙上位机选择控制是否开启智能小车超声波测距来进行避障功能,当选择开启超声波避障功能后,超声波模块测量到的距离将会被智能小车自主通过蓝牙模块发送到手机端蓝牙APP上位机并进行显示,时刻提醒小车的运行是否安全等情况,设计在小车距离障碍物15厘米内进行报警,避障报警时的距离数据以红色形式显示出来表示进入危险距离范围内,效果图如上图所示。与此同时,小车上的蜂鸣器将响起表示警告,小车将自动后退,直到退出危险距离位置。
☞物联网(IOT)远程控制上位机对智能小车的控制过程中的界面效果如下图所示:

开启网络数据并成功连接到物联平台后,便可以远程对智能小车进行远程控制,因此,尽管远在异地,也可以很方便的得知智能小车周围环境的相关数据。通过实际实验证明,基于贝壳物联的手机端上位机APP设计成功。
此外,为了更方便查看智能小车上传的历史数据,本设计将智能小车检测的数据发送至贝壳物联平台,可以随时登录官网查看数据,效果如图所示: