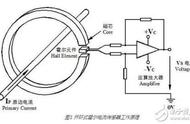
图4
再看图4中的两个匝数相等且互相垂直的绕组 d 和 q,其中分别通以直流电流 id 和iq,产生合成磁动势 F ,其位置相对于绕组来说是固定的。如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势 F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势的大小和转速也控制成与图 2 和图 3中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。当观察者也站到铁心上和绕组一起旋转时,在他看来,d 和 q 是两个通以直流而相互垂直的静止绕组。
如果控制磁通的位置在 d 轴上,就和直流电机物理模型没有本质上的区别了。这时,绕组d相当于励磁绕组,q 相当于伪静止的电枢绕组。
由此可见,以产生同样的旋转磁动势为准则,图2的三相交流绕组、图3的两相交流绕组和图4中整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的 iA、iB 、iC,在两相坐标系下的 i、i 和在旋转两相坐标系下的直流 id、iq 是等效的,它们能产生相同的旋转磁动势。
有意思的是:就图4 的 d、q 两个绕组而言,当观察者站在地面看上去,它们是与三相交流绕组等效的旋转直流绕组;如果跳到旋转着的铁心上看,它们就的的确确是一个直流电机模型了。这样,通过坐标系的变换,可以找到与交流三相绕组等效的直流电机模型。
如何求出iA、iB 、iC 与 iα、iβ 和 id、iq 之间准确的等效关系,这就是坐标变换的任务。
图5中绘出了 A、B、C 和 α、β 两个坐标系,为方便起见,取 A 轴和 α轴重合。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。由于交流磁动势的大小随时间在变化着,图中磁动势矢量的长度是随意的。

设磁动势波形是正弦分布的,当三相总磁动势与二相总磁动势相等时,两套绕组瞬时磁动势在 α、β 轴上的投影都应相等。


写成矩阵形式,得