▲根据执行机构能力分类
如上表,根据Tu和Tg的比值,我们把受控系统分为I型,II型和III型。
假设测试的阿喀琉斯是属于I型的受控系统,可以很好的被控制,根据测试结果用比较合适的采样和执行周期,比如每5秒钟检测一次位置情况并分别用P模型PI模型和PID模型来说明一下具体追赶过程。
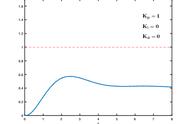
第一种模型:在P模型下,只有比例环节P=2,周期为2秒通知。第一个2秒阿喀琉斯跑了55米,乌龟爬了0.01米,误差还有4.5%,PID算法得出下面需要用9%的力量去跑,又过了2秒,阿喀琉斯还落后乌龟1米,那么阿喀琉斯需要用2%的速度向前跑,又过了2秒,阿喀琉斯还落后了乌龟1米,控制系统告知阿喀琉斯需要用2%的速度向前跑,结果1个小时过去了,阿喀琉斯始终在乌龟的后面1米的位置,2%的速度基本和跑步机向后的速度相当了,始终无法与乌龟位置一致。系统已经稳定了,还始终存在这样一个偏差,就是稳态误差,看来想要消除这个误差,我们需要用下一个模型-PI模型。

▲比例P模型参考图
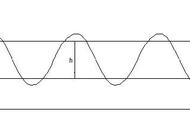
第二种类型,在PI模型下,在加入了积分环节后,假设积分时间设为30秒,那么根据公式,要计算阿喀琉斯在过去的30秒总共累积了多少误差(即把每次的误差都累加起来)。如上文2秒钟一通知,30秒会通知15次,这15次测量的距离误差都加起来。,开始的时候距离比较远,积分项会给阿喀琉斯带来更快的速度指令,但由于是考虑了之前的误差正向的,所以即使刚刚跑过了,15次误差的和还是正向的,所以会一直指导阿喀琉斯向前冲到下图1的位置,这个时候过去的累积误差已经是负的了,才要求阿喀琉斯向后跑,整个向后的过程又重复之前的累积误差,直到冲到下图2的位置才向前,所以最后的效果就是1-2-3-4-5,阿喀琉斯慢慢的向乌龟靠近,随着时间的推移,误差越来越小,最后达到消除了稳态误差。

▲比例积分PI模型参考图
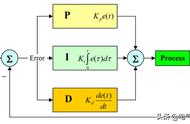
然而在上一个PI模型下,我们是否察觉阿喀琉斯来回跑的次数太多了?明明已经超过了乌龟很远了,还不回头(阿喀琉斯:PID控制器让我这么做的,你以为我不想回头吗!)。为了解决这个问题,需要引入微分分量,就是解决对未来趋势预测的问题,高等数学中讲到过微分就是求导,已知位置对时间的导数就是速度,速度对时间的导数就是加速度。用前一次误差减去当前次误差,如果有变化,因为测量的时间段相同,所以就意味着误差改变率发生了变化,就能预测未来下一次可能出现的误差会是什么样,就像我们知道了加速度的变化就可以推测速度的趋势是一个道理。按上面PI的算法,前一次误差假设是5%,当前误差是3%,因为是每两秒钟测量一次,所以计算的微分项是3%减去5%,再除以时间,得到-1%的的积分项,如果积分时间是30秒,代表这样的积分效果要持续30秒时间。这样当阿喀琉斯越靠近乌龟,减少效果越明显,当阿喀琉斯超过了乌龟的位置,比如超过了1%,那么微分项是-1%减去之前的3%,再除以采样时间2秒,得到-2%的减速项,这样的减速效果还要持续30秒的时间,可以看到增加了微分项能有效减少阿喀琉斯超出乌龟的位置,如下图13,只要找到合适的微分时间就能使阿喀琉斯提前减速,在刚刚超越乌龟的时候就往回返,快速稳定的和乌龟保持同一位置。

▲比例积分PID模型参考图
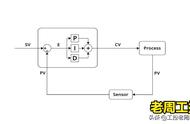
最后我们动态的显示下,追赶过程中各个参数的变化对追赶路径的影响,下图红线表示乌龟的位置,蓝色线表示阿喀琉斯的追赶位置。