2.3 步进电机
2.3.1 工作原理简介
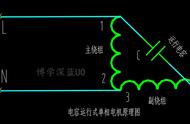
步进电动机的最大特征是在组装了线圈的定子内侧、转子的外侧有“小齿”。主要有定子、转子构成。定子有多对磁极并饶有线圈,转子由永久磁钢制作而成,转子上加工有齿隙均匀的小齿.

2.3.2 控制方式—电子細分

2.3.3 用途
● 由于步进电机的工作方式是一步一步进行的,其定位精度有限,如果需要高精度的定位,步进电机是不可取的;
● 步进电机无反馈装置,如果过载,可能会出现“丢步”现象;
● 步进电机性价比相对较高,可用于一般的精度控制中,为避免“丢步”一定要计算好最大负载;

2.4 伺服电机
2.4.1 伺服电机内部构造
AC伺服电动机的定子是3相构造。定子有6极(或是9极、12极)磁极,在对应的两个磁极上缠上线圈,使其据有相同的磁性(N极或者S极)。转子有4极(或者是8极)的磁极,以相反的顺序进行磁化。