文茂堂 运向勇 潘海宁 刘敬东
0 引言
钢丝绳电动葫芦通常采用带制动装置的锥形转子电动机,其制动原理是:电机不工作时,弹簧产生轴向推力,使制动环紧压在制动器端盖上,整机处于制动状态。电机通电工作时,锥形转子产生的轴向磁拉力克服弹簧的轴向推力,使转子轴向移动,制动轮上的制动环脱离制动器端盖,电机旋转带动卷筒旋转钢丝绳实现升降功能。对钢丝绳电动葫芦,只有一个工作制动器存在潜在风险:起升机构在提升负载过程中如出现制动力矩不足或传动环节失效,将发生失速溜钩现象, 引发安全事故。为满足更高的安全需求,钢丝绳电动葫芦制造商在传动环节末端即卷筒上设置了棘轮棘爪机构作安全制动器,当电动葫芦超速下降时触发棘爪与棘轮啮合,实现卷筒的减速制停。
GB/T 3811—2008 《起重机设计规范》要求:安全制动器在机构失效或传动装置损坏导致物品超速下降,下降速度达到1.5 倍额定速度前自动起作用。JB/T9008.1—2004《钢丝绳电动葫芦第1 部分:型式与基本参数、技术条件》要求安全制动器在正常情况下不起作用;当工作制动器失灵时,它能可靠地支持住额定载荷且制动下滑量应不大于v /100(v 为额定载荷下1 min 内稳定起升的距离),且不大于200 mm。
钢丝绳电动葫芦制造商在产品的出厂检验中,对安全制动器的试验方法一般采用载荷试验法,即提升额定载荷后,通过人为调整锥形制动器自由坠落过程中触发安全制动器,观察负载是否可靠制停。这种试验方法直观简单,易于观察制停效果,但对安全制动器的触发动作速度、制停时间等参数难以采集并量化分析。
现行特种设备安全技术规范和行业标准中未涉及到电动葫芦安全制动器详细、具体的检验检测方法,致使现场检验与型式试验缺乏理论指导与技术支持。
1 安全制动器的构成与触发原理
1.1 机构构成
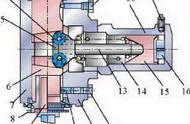
钢丝绳电动葫芦安全制动器典型结构形式如图1 所示。该机构由棘轮导轨组合、滚轮棘爪组合、拉伸弹簧3 部分构成,其中卷筒、棘轮导轨组合为原动件,滚轮棘爪组合、拉伸弹簧为从动件,电动葫芦箱体为机架。
1)棘轮导轨组合 每一段弧形导轨对应一个棘齿,棘轮与弧形导轨采用螺栓连接或焊接方式固定连接;棘轮内圈利用环氧树脂粘接摩擦材料,2 个半圆形的棘轮导轨组合通过螺栓连接方式紧固在电动葫芦卷筒上。
2)滚轮棘爪组合 滚轮与棘爪构成活动铰臂,可饶固定销轴摆动,销轴同时固定在电动葫芦的箱体上。滚轮与弧形导轨接触并产生相对运动。滚轮的滚动可减小因相对运动产生的摩擦与磨损。接触期间铰臂的角速度与导轨的角速度相同。
3)拉伸弹簧 当棘爪与滚轮组合摆动时,弹簧受拉,限制摆动幅度,保证棘爪及时复位。
1.2 机构的触发原理
1)正常作业工况 当电动葫芦以额定起升速度进行上升或下降作业时,弧形导轨与卷筒一起转动,带动滚轮,使滚轮棘爪组合饶固定销轴摆动,摆动到一定倾角后受弹簧拉力与自身重力的作用向反方向摆动。因棘轮机构具有单向逆止属性,上升方向不会啮合;下降方向因铰臂的摆动倾角较小,棘轮与棘爪也不会啮合。
2)超速下降工况 当电动葫芦锥形制动器失灵或传动环节出现断轴情况下,卷筒超速下降,卷筒带动弧形导轨一直加速旋转,滚轮棘爪组合随之加速摆动,摆动倾角加大,棘爪与棘齿之间的间隙减小;当倾角增大到一定角度后,滚轮偏离导轨外形轨迹,安全制动器的棘爪与棘轮啮合。此时机构的自由度为0,棘轮压紧摩擦片并对卷筒产生摩擦阻力消耗能量,直至卷筒完全停。
当棘轮棘爪啮合时,滚轮按顺时针方向向外旋转,带动其下方的小销轴触发电气开关,断开电动葫芦下降方向的控制回路。

1.棘轮 2. 棘爪 3. 电气开关 4. 拉动弹簧 5. 滚轮
6. 弧形导轨 7. 卷筒 8. 连接螺栓 9. 摩擦片
图1 安全制动器结构形式
2 安全制动器超速工况下的制动力学模型
电动葫芦安全制动器是一种机械制停装置,其超速保护功能在以下两种紧急工况下发挥作用:1)锥形制动器制动力矩不足时( 完全失效是其最不利情形),当电动葫芦起升额定载荷下降过程或空中悬停时整机突然断电,负载在重力作用下超速下降;2)当电动葫芦起升额定载荷下降过程或空中悬停时,传动环节中的电机轴或减速器内的齿轮轴发生断轴时。两种工况的区别在于,安全制动器发挥制动作用时需要克服的各运动部件的转动惯量引起的惯性力矩不同。
2.1 触发动作速度V 动与制停距离S
考虑到传动环节较多,断轴或断齿情形下制动工况更为复杂,仅选取第1 种工况进行分析,设定锥形制动器完全失效,电动葫芦起吊额定载荷处于下降过程中,整机突然断电。制停距离S 为安全制动器发挥作用前负载加速下降的距离S 1 及安全制动器发挥作用到停止运动期间减速制动距离S 2 之和,即S =S 1 S 2。负载以额定起升速度v 0 加速下降到棘轮触发动作速度v 动期间经历的时间t 1,此阶段为加速过程,将t 1定义为触发动作时间;安全制动器发挥作用后负载速度
由v 动减速至0 期间经历时间t 2,此阶段为减速过程,可视为等减速运动,将t 2 定义为减速制停时间。制停时间t 包含2 部分,即t=t 1 t 2。
为便于分析,将触发动作速度v 动明确定义为卷筒超出额定起升速度下降,引起棘轮棘爪触发啮合时钢丝绳绕出卷筒的线速度,可知


求解负载在棘轮触发动作制停时下降速度V1,可知