求解负载超速下降停止过程中2 阶段的滑动距离,可知

制停距离是安全制动器制动性能的重要考核指标。测量制停距离的方法较多,式(3)表明,通过间接测量触发动作时间t 1,减速制停时间t 2,以及起升电机在触发动作时的转速n 可求得此参数。
2.2 安全制动器制动力矩M 制
安全制动器依靠摩擦片与卷筒之间产生的摩擦力使负载减速制停,其制动力矩M 制需同时克服负载对卷筒产生的负载力矩M 载,负载在触发动作速度V 动时对卷筒产生的惯性力矩M 载惯,以及传动系统中各旋转部件(电机转子系统、各级齿轮轴、齿轮、卷筒)因惯性产生的惯性力矩M 转惯,即

式(5)和式(6)中Q 为电动葫芦额定起升载荷,N;W 为卷筒角速度,rad/s ;t 2 为棘轮减速制停时间, s;J 卷为卷筒负载转动惯量。求解各旋转部件产生的惯性力矩M 转惯,应先将各
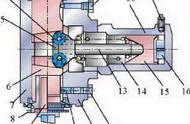
旋转部件转动惯量折算到卷筒上。电动葫芦为3 级传动系统(见图2),设各级传动比依次为u 1、u 2、u 3,不计传动机构损耗,根据动能守恒定理

等式中左边代表电机轴传递动能,右边代表卷筒传递动能,则