Range图是2D的,可以借鉴2D目标检测方法,比如LaserNet,还有一些借鉴了U-Net、RPN、R-CNN、FCN、FPN等。
Range图的像素包含的是距离信息,而非颜色值,因此传统的2D标准卷积算子无法完全适用,滑动窗口中的像素在3D空间中可能会相距很远。一些工作采用了新算子来有效地从Range像素中提取特征,包括深度扩张卷积[11]、图算子[26]和元核卷积[67]等。
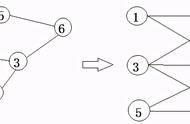
Range图是从Range视图(Range View)中获取的,RangeView是点云的球面投影。
对于许多基于深度的方法[178,11,67,26]来说,直接从Range视图检测3D目标是很自然的。然而,从Range视图进行检测不可避免地会遇到球面投影所带来的遮挡和尺度变化问题。为了规避这些问题,许多方法尝试利用其他视图来预测3D目标,例如[219]中利用的圆柱形视图(CYV),其它方案尝试Range视图和鸟瞰视图(BEV)、点视图(PV)的组合。
Range视图由于可以借鉴2D卷积的优点,做特征提取比较好,但由于遮挡和尺度问题,直接在上面做检测效果不好,需要结合BEV来做检测,所以现在一般是Range图做特征提取,BEV上做检测。
3D目标检测的学习目标3D目标检测的学习目标主要是针对小目标(相比检测范围,目标太小),另一方面是由于点云的稀疏性,如何准确估计其目标的中心和尺寸也是一个长期挑战。
1、Anchor-based方法anchor是预定义的长方体,具有固定的形状,可以放置在3D空间中。3D目标可以基于正anchor进行预测,这些正anchor与GT的IoU最大。anchor-based的3D目标检测方法一般是从鸟瞰图上检测3D目标,将3D anchor放置在BEV特征图的每个网格单元上进行。3D anchor通常对于每个类别都有一个固定的尺寸,因为同一类别的目标有相似的大小。
anchor-based的损失函数包括了分类损失、回归损失、偏航角损失等。分类损失常用的是二值交叉熵、Focal loss,回归则是SmoothL1,航向角需要注意使用bin-based航向估计较好。除了这些单独的损失函数外,将整个3D目标作为整体去考虑,也有使用IoU loss的,再辅以corner loss,让3D目标的检测更加稳定。
下面是anchor-based方法的示意图和主要目标损失函数:


anchor-free方法去掉了复杂的anchor设计阶段,可灵活应用于BEV、点视图和Range视图等。没有了anchor,就需要找其它正负样本分配方法。比如基于一些网格(BEV网格单元、体素、柱体)进行分配正负样本,比如PIXOR、CenterPoint等。还有基于点的分配策略,大部分都是先将前景点分割出来,在3D目标内或附近的作为正样本,并学习这些前景点。基于Range的分配主要是将Range像素在3D目标内的作为正样本,并且回归的时候不是以整个3D坐标系统为基础,而是以目标为中心的回归坐标系。DETR提出了一种集合到集合的分配方式,利用匈牙利算法预测结果自动分配到对应的GT。
anchor-free方法设计灵活,不引入其它先验,学习过程简化了很多,其中基于中心的方法[329]对小目标检测有较大潜力可挖。虽然优点不少,但不可否认,anchor-free方法如何选择合适的正样本来生成预测结果是个问题,相比于anchor-based中使用高IoU正样本,anchor-free可能会选到一些不好的正样本,造成预测结果出现偏差。
下面显示了anchor-free方法和一些里程碑方法。

利用辅助任务来增强3D目标的空间特征,并能对3D目标检测提供一些隐性的指导。常用的辅助任务包括:语义分割、IoU分支预测、目标形状补全、部件识别。