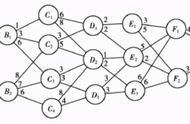
图4 多自主机器人协同规划体系结构示意图
路径规划研究
当给定了某一特定的任务之后,如何规划机器人的运动方式将至关重要。机器人的规划包括两部分内容:基座移动到适合操作的位置和转动手臂关节完成操作。包括三个问题:基座点到点运动规划;关节空间规划;综合规划。
本章研究几种常用的运动规划算法:图搜索法、RRT算法、人工势场法、BUG算法。并对部分算法的自身缺陷进行了一些改进。
图搜索法图搜索法依靠已知的环境地图以及地图中的障碍物信息构造从起点到终点的可行路径。主要分成深度优先和广度优先两个方向。深度优先算法优先扩展搜索深度大的节点,可以快速的得到一条可行路径,但是深度优先算法得到的第一条路径往往是较长的路径。广度优先算法优先扩展深度小的节点,呈波状的搜索方式。广度优先算法搜索到的第一条路径就是最短路径。
可视图法


图5 可视图
由此可见,利用可视图法规划避障路径主要在于构建可视图,而构建可视图的关键在于障碍物各顶点之间可见性的判断。判断时主要分为两种情况,同一障碍物各顶点之间可见性的判断以及不同障碍物之间顶点可见性的判断。