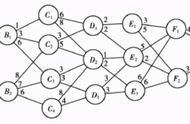
图8 新节点的判断
上图中各个空心点是中间的父节点的可能扩展。椭圆圈起的空心点表示这个新节点不符合回归函数约束,剩下的两个未被圈起的空心节点到其父节点的距离小于该节点到随机树上任意节点的距离,这两个点可以成为随机树的新节点。
综上,滚动窗口内随机树构建的具体步骤如下:


人工势场法
人工势场法是由Khatib提出的一种用于机器人运动规划的虚拟力方法。其基本思想是将目标和障碍物对机器人运动的影响具体化成人造势场。目标处势能低,障碍物处势能高。这种势差产生了目标对机器人的引力和障碍物对机器人的斥力,其合力控制机器人沿势场的负梯度方向向目标点运动。人工势场法计算方便,得到的路径安全平滑,但是复杂的势场环境可能在目标点之外产生局部极小点导致机器人无法到达目标。
为了解决人工势场法的局部极小点问题,学者们提出了各种改进方法。主要分成两个方向:一个是构造合适的势函数以减小或避免局部极小点的出现;另一种是在机器人遇到局部极小点后结合其他的方法使机器人离开局部极小点。前者一般需要全局地图信息,并且依赖于障碍物的形状。当环境复杂时难以应用。后者多利用搜索法、多势场法和沿墙行走法等方法使机器人离开局部极小点。搜索法利用最佳优先、模拟退火、随即搜索等策略寻找比局部极小点势场值更低的点使机器人继续移动。由于未知环境中大多缺乏启发信息,搜索方法的效率很低。多势场法构造多个全局极小点相同,而局部极小点不同的势函数,在机器人陷入某个局部极小点时,规划器就切换势函数使机器人离开该点。
但是在未知的环境中这样的多个势场很难构造,而且该方法可能导致机器人在回到曾逃离的局部极小点。由于局部极小点是某个或多个障碍物的斥力势场与引力势场共同作用产生,其位置与障碍物距离必然不远,沿墙行走法正是利用这样的远离,使机器人在遇到局部极小点后参照类似BUG算法的环绕行为绕过产生局部极小点的障碍物继续前进。这种方法可靠性高,不依赖环境的先验信息和障碍物形状。
本节构造人工势场进行机器人平动的在线运动规划,利用一种沿墙行走法对基本的人工势场法进行改进。
基本人工势场法
作用在机器人上的假想引力和斥力为势函数的负梯度,因而人工势函数应该具有以下特征:
- 非负且连续可微;
- 斥力势强度距离障碍物越近其强度越大;
- 引力势强度离目标位置越近其强度越小。