本文采用梯度下降搜索的方法[31-32]来进行外参数的解算。该方法可用于建模和解决复杂的非线性最小二乘问题,在实际工程问题中,采用基于该原理的Ceres工具进行解算。输入本文研究的目标函数、参数与初始值,设置合适的步长进行迭代,得出最佳的外参数值。该方法不需要对非线性的方程进行求偏导数进行线性化然后再使用最小二乘求解系数,而且具有求解速度快的特点。
2 试验及分析2.1 设备与数据
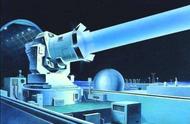
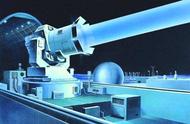
本文试验采用的是车载激光扫描系统,组成部分有激光扫描仪、GPS天线、惯性组合导航(IMU)、CCD相机等,设备集成外观如图 3所示,硬件参数介绍见表 1。

图 3 车载激光扫描系统Fig. 3 Vehicle laser scanning system
表 1 硬件类型及参数一览表Tab. 1 List of hardware types and parameters
| 硬件 | 型号 | 性能参数 |
| 激光扫描仪 | VUX-1 | 激光器类型:脉冲式 扫描视场角:0°~330° 最大射程920m |
| GPSIMU系统 | G5Ant-42AT1国产 | 差分后姿态精度:0.002° 差分后航向精度:0.005° 数据存储空间:8~32G |
| 相机 | Ladybug5 | 成像模块:6台CCD及低畸变镜头 分辨率:2448×2048 |
本文使用该车载激光扫描系统采集的北京市亦庄泰和路与博兴路交叉口附近路段检校数据。对该数据进行编码以及无检校参数解算,显示该检校区位于十字路口,主要地物有树木、路灯和路牌等如图 4所示,图 5为部分路牌细节显示效果。

图 4 检校区数据高程渲染Fig. 4 Elevation color of the data in the test area

图 5 检校区数据路牌细节Fig. 5 Road signs details of the data in the test area
2.2 试验与验证
对于地面所在平面数据的提取,本试验采用RANSAC算法;对于路牌等平面特征数据的提取,首先采用区域生长,计算点与邻域点的距离,设置阈值为(0~0.06m),提取平面点云,然后计算这些点云的法向量,设置法向量夹角阈值为(0°~5°),与地面平行和法向量Z轴坐标为零等规则的聚类方法完成平面特征的精细化提取,方法原理参照1.2.1节。此次试验提取了15组同名平面(包括地面),进行15组平面配准的外参数标定,路牌、隔离墙等平面之间存在不同大小的夹角,且与地面存在垂直关系,用这些平面来完成两次采集的重叠点云在三维空间上的检校。地面提取结果如图 6所示,路牌、隔离墙等平面的提取结果如图 7所示。