ceph_message_3
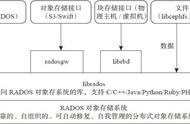
4.5 Ceph通信数据格式
通信协议格式需要双方约定数据格式。
消息的内容主要分为三部分:
- header //消息头,类型消息的信封
- user data //需要发送的实际数据
- payload //操作保存元数据
- middle //预留字段
- data //读写数据
- footer //消息的结束标记
class Message : public RefCountedObject {
protected:
ceph_msg_header header; // 消息头
ceph_msg_footer footer; // 消息尾
bufferlist payload; // "front" unaligned blob
bufferlist middle; // "middle" unaligned blob
bufferlist data; // data payload (page-alignment will be preserved where possible)
/* recv_stamp is set when the Messenger starts reading the
* Message off the wire */
utime_t recv_stamp; //开始接收数据的时间戳
/* dispatch_stamp is set when the Messenger starts calling dispatch() on
* its endpoints */
utime_t dispatch_stamp; //dispatch 的时间戳
/* throttle_stamp is the point at which we got throttle */
utime_t throttle_stamp; //获取throttle 的slot的时间戳
/* time at which message was fully read */
utime_t recv_complete_stamp; //接收完成的时间戳
ConnectionRef connection; //网络连接
uint32_t magic = 0; //消息的魔术字
bi::list_member_hook<> dispatch_q; //boost::intrusive 成员字段
};
struct ceph_msg_header {
__le64 seq; // 当前session内 消息的唯一 序号
__le64 tid; // 消息的全局唯一的 id
__le16 type; // 消息类型
__le16 priority; // 优先级
__le16 version; // 版本号
__le32 front_len; // payload 的长度
__le32 middle_len;// middle 的长度
__le32 data_len; // data 的 长度
__le16 data_off; // 对象的数据偏移量
struct ceph_entity_name src; //消息源
/* oldest code we think can decode this. unknown if zero. */
__le16 compat_version;
__le16 reserved;
__le32 crc; /* header crc32c */
} __attribute__ ((packed));
struct ceph_msg_footer {
__le32 front_crc, middle_crc, data_crc; //crc校验码
__le64 sig; //消息的64位signature
__u8 flags; //结束标志
} __attribute__ ((packed));
5. Ceph CRUSH算法
5.1 数据分布算法挑战
- 数据分布和负载均衡:
- a. 数据分布均衡,使数据能均匀的分布到各个节点上。
- b. 负载均衡,使数据访问读写操作的负载在各个节点和磁盘的负载均衡。
- 灵活应对集群伸缩
- a. 系统可以方便的增加或者删除节点设备,并且对节点失效进行处理。
- b. 增加或者删除节点设备后,能自动实现数据的均衡,并且尽可能少的迁移数据。
- 支持大规模集群
- a. 要求数据分布算法维护的元数据相对较小,并且计算量不能太大。随着集群规模的增 加,数据分布算法开销相对比较小。
5.2 Ceph CRUSH算法说明
- CRUSH算法的全称为:Controlled Scalable Decentralized Placement of Replicated Data,可控的、可扩展的、分布式的副本数据放置算法。
- pg到OSD的映射的过程算法叫做CRUSH 算法。(一个Object需要保存三个副本,也就是需要保存在三个osd上)。
- CRUSH算法是一个伪随机的过程,他可以从所有的OSD中,随机性选择一个OSD集合,但是同一个PG每次随机选择的结果是不变的,也就是映射的OSD集合是固定的。
5.3 Ceph CRUSH算法原理
CRUSH算法因子:
- 层次化的Cluster Map
- 反映了存储系统层级的物理拓扑结构。定义了OSD集群具有层级关系的 静态拓扑结构。OSD层级使得 CRUSH算法在选择OSD时实现了机架感知能力,也就是通过规则定义, 使得副本可以分布在不同的机 架、不同的机房中、提供数据的安全性 。
- Placement Rules
- 决定了一个PG的对象副本如何选择的规则,通过这些可以自己设定规则,用户可以自定义设置副本在集群中的分布。
5.3.1 层级化的Cluster Map

ceph_crush
CRUSH Map是一个树形结构,OSDMap更多记录的是OSDMap的属性(epoch/fsid/pool信息以及osd的ip等等)。
叶子节点是device(也就是osd),其他的节点称为bucket节点,这些bucket都是虚构的节点,可以根据物理结构进行抽象,当然树形结构只有一个最终的根节点称之为root节点,中间虚拟的bucket节点可以是数据中心抽象、机房抽象、机架抽象、主机抽象等。
5.3.2 数据分布策略Placement Rules
数据分布策略Placement Rules主要有特点:
a. 从CRUSH Map中的哪个节点开始查找
b. 使用那个节点作为故障隔离域
c. 定位副本的搜索模式(广度优先 or 深度优先)
rule replicated_ruleset #规则集的命名,创建pool时可以指定rule集 { ruleset 0 #rules集的编号,顺序编即可 type replicated #定义pool类型为replicated(还有erasure模式) min_size 1 #pool中最小指定的副本数量不能小1 max_size 10 #pool中最大指定的副本数量不能大于10 step take default #查找bucket入口点,一般是root类型的bucket step chooseleaf firstn 0 type host #选择一个host,并递归选择叶子节点osd step emit #结束 }
5.3.3 Bucket随机算法类型

ceph_bucket
- 一般的buckets:适合所有子节点权重相同,而且很少添加删除item。
- list buckets:适用于集群扩展类型。增加item,产生最优的数据移动,查找item,时间复杂度O(n)。
- tree buckets:查找负责度是O (log n), 添加删除叶子节点时,其他节点node_id不变。
- straw buckets:允许所有项通过类似抽签的方式来与其他项公平“竞争”。定位副本时,bucket中的每一项都对应一个随机长度的straw,且拥有最长长度的straw会获得胜利(被选中),添加或者重新计算,子树之间的数据移动提供最优的解决方案。
5.4 CRUSH算法案例
说明:
集群中有部分sas和ssd磁盘,现在有个业务线性能及可用性优先级高于其他业务线,能否让这个高优业务线的数据都存放在ssd磁盘上。
普通用户:

ceph_sas.png
高优用户: