1 CAN的一些基本概念1.1 什么是CAN总线
CAN 是 Controller Area Network 的缩写,是 ISO 国际标准化的串行通信协议。通俗来讲,CAN总线就是一种传输数据的线,用于在不同的ECU之间传输数据。
CAN总线有两个ISO国际标准:ISO11898 和 ISO11519。其中:
- ISO11898 定义了通信速率为 125 kbps~1 Mbps 的高速 CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度 ≤ 40米。
- ISO11519 定义了通信速率为 10~125 kbps 的低速 CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。
Tips: <总线的传输速率>:又称为总线的通信速率,指的是位速率。或称为比特率(和波特率不是一回事),表示的是:单位时间内,通信线路上传输的二进制位的数量,其基本单位是 bps 或者 b/s (bit per second)。
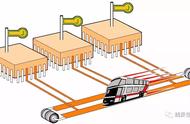
下图中,左边是高速CAN总线的拓扑结构,右边是低速CAN总线的拓扑结构。

如图中所示,CAN总线包括CAN_H 和 CAN_L 两根线。节点通过CAN控制器和CAN收发器连接到CAN总线上。
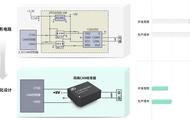
1.3 CAN信号表示Tips :通常来讲,ECU内部集成了CAN控制器和CAN收发器,但是也有没集成的,需要自己外加。
在CAN总线上,利用CAN_H和CAN_L两根线上的电位差来表示CAN信号。CAN总线上的电位差分为显性电平和隐性电平。其中显性电平为逻辑0,隐性电平为逻辑1。
ISO11898标准(125kbps ~ 1Mbps)和ISO11519标准(10kbps ~ 125kbps)中CAN信号的表示分别如下所示:

发送过程:
CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。CAN发射器接收逻辑电平之后,再将其转换为差分电平输出到CAN总线上。

接收过程:
CAN接收器将CAN_H 和 CAN_L 线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。