条件:等腰△ABC和等腰△ADE,∠BAC=∠DAE(顶角相等),点B、D、E三点共线时
结论5:A、B、C、E四点共线.

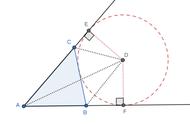
条件:等腰△ABC和等腰△ADE,∠BAC=∠DAE(顶角相等),点D在BC上运动.
结论6:四边形ADCE是对角互补且邻边相等的共圆四边形,CA平分∠DCE.
模型2 等边三角形手拉手旋转

条件:△OAB,△OCD为等边三角形
结论:△OAC≅△OBD,
第三边的夹角∠AEB=60°,EO平分∠AED
四边形OABE对角互补,
四边形OCED对角互补、邻边相等、角平分线、60°的结论.
模型3 等腰直角三角形手拉手旋转

条件:△OAB,△OCD为等 腰直角三角形
结论:△OAC≅△OBD,
第三边的夹角∠AEB=90°,EO平分∠AED.
正多边形中的全等模型
模型1 等边三角形中的全等